東京工科大学大学からのお知らせ ゼミ研究室紹介
掲載している内容は、2024年11月時点のものです
コンピュータサイエンス学部
ロボットビジョン・Spatial AI研究室
ロボットビジョン・Spatial AI研究室の1枚!


ここに登場しているのは、どんなロボットですか?

ロボットメーカーと共同開発した教育用ロボットです。
どのような研究に使われるのでしょうか?
AIによって制御し、学習させて成長するロボットの実験などに使っていきます。
AI搭載ロボットが実現する新たな未来を切り開く
研究の目的
AIが環境を認識してロボットのジョブを広げる
ロボットビジョン・Spatial AI研究室は、画像解析・画像認識やAIによる空間(Spatial)の認識といった分野を中軸にしている研究室だ。その名称にあるように、ロボットやドローンが搭載するカメラがとらえた画像の解析や処理の技術と、AI技術を融合し、次世代のロボットAIにつながる研究を進めている。
「ロボットの行動と、稼働する環境をセットにして経験としていくことで、成長するロボットAIを実現できると考えています」と松岡先生は話す。
「例えば、近年普及してきたファミレスなどで活躍する配膳ロボットですが、現状ではお客さんがいる席にプログラムされた経路で食事を運び、もし経路の途中に人などがいたら進路が空くまで止まるような仕組みです。しかしロボットに搭載したAIが、周辺の環境や状況を画像から認識することで、障害がある場合は別の経路を通って食事を運ぶように自ら判断し行動するようなことが可能になります」
想定しているのは、主に人間とロボットが混在して働く現場だ。中小の工場や農場などでの作業支援に、AIロボットが活躍することをめざす。こういった現場で作業にプログラムされていない想定外のタスクが生じた場合は、従来は人間が判断しロボットに新たな指示をしなければならない。その部分をAIが環境認識により自ら判断し動くことで、作業における人の関与を極力減らし、深刻な人手不足の解消につなげることができるという。
「この研究では、ロボットAIがどのように環境を認識し、どのように記憶するべきかを検証することが必要です。最終的には統合環境認知機構SHIKIを実装することをめざしています」
研究の応用
画像解析技術を応用した非破壊検査
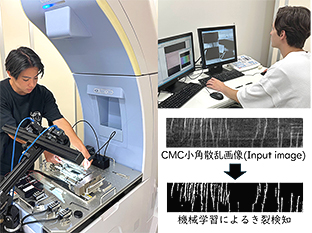 X線タルボ・ロー撮影装置を使いCMC素材の小角散乱画像を撮影。撮影した細かな亀裂や空間の画像をAIで解析し、破断の前兆を導き出す
X線タルボ・ロー撮影装置を使いCMC素材の小角散乱画像を撮影。撮影した細かな亀裂や空間の画像をAIで解析し、破断の前兆を導き出す
この研究室では、持ち前の画像解析・処理とAIを用いた環境認識の技術を応用し、いくつかの研究プロジェクトに参加している。そのひとつが画像解析を用いた新素材の非破壊検査手法の開発だ。航空機のエンジンや新幹線のブレーキパッドなどに用いられるセラミックス基複合材料(CMC)は、軽量で熱に強く強度も高いが、従来の金属素材とは異なり、破断の前兆がつかみにくいことが大きな課題となっている。そこで松岡先生は、詳細なX線画像を解析しAIで判定する、新たな非破壊検査の手法を提案し研究を進めている。
「CMCは、その構造上、内部に細かな亀裂などを許容する素材です。通常のX線より詳細な小角散乱画像が得られるX線タルボ・ロー撮影装置を用いて、CMCの素材内に生じている細かな亀裂や空間をキャッチ。その亀裂の状態や素材密度と壊れやすさとの相関を導き出そうと、研究開発を行っています。従来にないCMCの非破壊検査法の確立をめざしています」
東京工科大学は、これまでCMCの素材開発や製造に携わる国家的プロジェクトに参画し、セラミックス複合材料(CMC)センターの設置をはじめCMCの実用化に尽力してきた歴史がある。松岡先生が取り組むこの研究はその延長として位置づけられ、実現すれば日本のCMC製品の製造開発に大きな進歩をもたらすものとなるという。
研究の意義
学外プロジェクトでチームの役割を理解
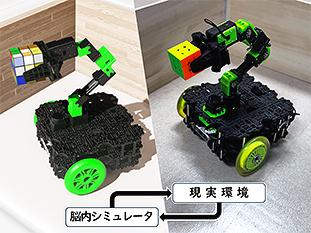 企業との連携プロジェクトのひとつで、教育用ロボットLimeを用いた現実とバーチャル空間の連携実験。バーチャル環境(NVIDIA Omniverse、写真左)と同じ動きを現実環境(写真右)のロボットがトレースしている
企業との連携プロジェクトのひとつで、教育用ロボットLimeを用いた現実とバーチャル空間の連携実験。バーチャル環境(NVIDIA Omniverse、写真左)と同じ動きを現実環境(写真右)のロボットがトレースしている
この研究室の大きな特徴として、研究活動が産学連携・官学連携のプロジェクトへの参画として進行しているものが多いことが挙げられる。ロボットAIに関わる研究では、世界規模のIT企業やロボットメーカーと連携したプロジェクト研究がいくつか進行中だ。また前記で紹介したCMC非破壊検査も産官学連携プロジェクトの一環であり、複数の大学や研究室で並行して模索される手法のひとつとして研究されている。このようなプロジェクト型の研究環境では、携わる学生にも外部との関係に対応した意識づけが要求される。
「プロジェクトベースの研究では、会社のチーム開発のように役割分担をしつつ、一人では達成できない大きな目的を達成することを重視しており、学生にも意識してもらうように指導しています。研究の全体像を理解する一方で、そのなかでの自分の位置や役割を意識する必要があります」
このような意識づけで取り組むことで、社会のニーズと研究室のニーズのギャップが少なくなり、よりユーザーを意識できるようになると松岡先生は話す。学生は社会に求められるモノづくりに携わることができ、研究室としては継続可能なテーマを研究できるようになるのだ。
「チーム全体を見渡せる目を持つ一方で、自分の仕事の範囲を理解して、その持ち場をしっかりと守り切る能力が、社会人には圧倒的に必要とされています。プロジェクトに携わった学生にはぜひこの能力を身につけ、社会で活躍してほしいですね」
幅広い研究テーマ
強化学習に基づく自動運転と最適道路の自動設計
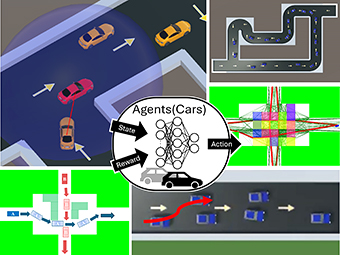
完全自動運転レベル5の実現をめざし、車両制御および道路設計に関する最先端の研究を行っている。車々間通信や路車間通信を活用し、強化学習を用いた最適な自動車制御のアルゴリズムを開発するとともに、自動運転車に適した道路設計についても研究を進めている。将来的には、これらの技術の共進化を通じて、自動車と道路インフラが相互に連携し、より高性能で安全な自動運転社会の構築をめざす。
物体認識、環境認識に関する種々の研究
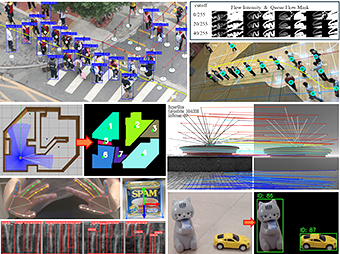
これらの画像は、当研究室で行っている画像認識や環境認識に関する研究の一例。画像上部の3枚は、現在取り組んでいる科研費プロジェクト「密集回避のための簡便な利用者数自動計測システムの開発」に関連したシーン。この研究では、待ち行列の人数を簡単に計測できるシステムを提案している。映像内のすべての人数を計測する既存システムは存在するが、このシステムは、映像内から列を自動で検出し、列内の人だけを計測することで、特定のサービス利用者だけを計測することができる。このシステムの導入により、密集を避けた安全なサービスの提供が可能となるとともに、行列管理が一層スムーズになると考えられ、様々なシーンでの活用が期待できる。
学生の声

自分で考え行動するAIロボットの実現をめざす
大学院バイオ・情報メディア研究科
修士1年 M.W.さん
*学年・インタビュー内容は取材時のもの
以前から「人間のような人工知能を作りたい!」と漠然とした目標があったので、研究室紹介で松岡先生が解説されていた「自分で考えるロボット」についての研究に興味を持ちました。私たち人間と同じような感覚や思考の一部を、機械であるロボットに与えることができる可能性に強く引かれて、研究室に入りました。進学先を決めるときや研究室を選ぶときには、テレビでもSNSでも何でも良いので、何か自分が興味を持てることを探してみると良いと思います。どんな研究をしているのか、どんな人がいるのかなど、いろいろなことを調べて自分に合った研究室を見つけることが大切です。
現在、私が取り組んでいるのが、ロボットが自分でものを考えるために必要な知識を蓄えるための研究です。具体的には、ロボットが見たモノの情報や、ロボット自身の動作の評価などをリンクさせ、ロボットと環境を統一した形式で保持する機構を開発しています。最終的には、ロボット自身が過去の経験に基づいて、行動の結果を予測して、行動するロボットの実現が目標です。将来は今よりも賢いロボットを作ることができるようになると信じています。またこの研究で培ってきた機械学習や画像処理を用いたロボットのソフトウェア開発研究の経験を生かして、社会に貢献できる開発エンジニアをめざしています。

山口大学大学院理工学研究科博士後期課程自然科学基盤系専攻修了。日本学術振興会特別研究員を経て、2022年より東京工科大学コンピュータサイエンス学部講師。
その他のゼミ研究室紹介
- メディア学部 ミザンセーヌデザイン研究室
- メディア学部 デジタルジャーナリズム研究室
- 工学部 応用化学科 バイオマス・超分子材料学研究室
- コンピュータサイエンス学部 社会情報専攻 サービスシステムデザイン研究室
- 応用生物学部 皮膚生理学研究室
- 応用生物学部 植物工学研究室
- 医療保健学部 臨床工学科 苗村研究室
このページに関するお問い合わせ
| 大学・部署名 | 東京工科大学 広報課 |
|---|---|
| Tel | 0120-444-903 |
| pr@stf.teu.ac.jp |
